


























讓多個機器人共用“智慧大腦” 明月湖正在干這件事
多機器人協同系統,可以讓多個機器人共用“智慧大腦”,是機器人與人工智能領域的研究熱點。5月23日,新重慶-重慶日報記者從兩江協同創新區獲悉,近日,位於明月湖畔的哈工大重慶研究院和深圳開鴻數字產業發展有限公司(下稱“深開鴻”)達成合作,雙方將充分發揮在智能機器人和開源鴻蒙操作系統領域的技術與資源優勢,基於哈工大重慶研究院牽頭的國家重大項目,共同打造全國產化多機器人協作具身智能操作系統(下稱“多機器人協作操作系統”)。
其中,哈工大重慶研究院下屬工業安全操作系統與無人裝備中心將承擔本次合作項目的關鍵技術攻堅任務。此前,該中心已經在人形機器人、多機器人協同、智能制造等多個前沿領域掌握了關鍵核心技術。
在多機器人協同系統開發中,該中心圍繞異構多機器人在工業、服務等典型應用場景,通過將人工智能大模型、分布式機器人協作操作系統、協作機器人本體標准化能力特征、協作場景標准化定義完成了技術體系貫通。並成功開發雙足人形機器人、智能煙機及為智慧工廠量身定制的“數字孿生系統”。其中,雙足人形機器人具有仿生支腿,剛柔耦合,具備可折疊、可變形等特種應用能力,集成驅動、傳動、感知和控制系統,實現了穩定行走,為通用人形機器人行走底盤和特種應用打下了基礎。
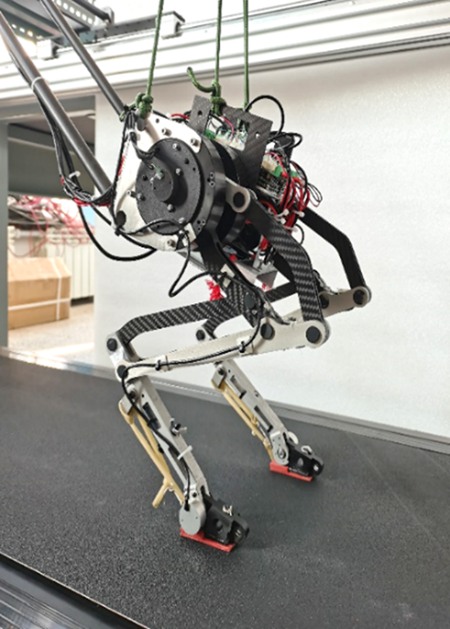
雙足人形機器人。(受訪者供圖)
中心負責人表示,多機器人協作操作系統開發面臨著諸多挑戰。例如,准確的定位和建圖對於機器人之間的協作和任務執行至關重要。然而,由於環境的復雜性和傳感器的限制,單個機器人的定位和建圖可能存在誤差。需要數據融合和優化算法,以提高定位和建圖的准確性,並降低計算復雜度。
該負責人介紹,多機器人協作操作系統可被分解為三個層次,一是本體基礎能力抽象和數據的共享互通,二是環境和位置信息的共享互通,三是多機器人協同作業組網與調度。
“不同於普通的商用機器人協作系統,中心聯合深開鴻推動打造的全國產化多機器人智能協作具身智能操作系統,向上需兼容大模型任務智能理解與指令生成,向下抽象各類機器人能力和執行對象,形成雲端協同、去中心化、自組網的智能化任務執行多機器人系統。”該負責人表示。
目前,合作雙方已與國內機器人企業一道,圍繞國產化“智能機器人與協同操作系統”的產學研用開展深度合作,預計今后將產出一批重要成果。(新重慶-重慶日報 記者 申曉佳)
分享讓更多人看到 
人民日報社概況 | 關於人民網 | 報社招聘 | 招聘英才 | 廣告服務 | 合作加盟 | 供稿服務 | 數據服務 | 網站聲明 | 網站律師 | 信息保護 | 聯系我們
人民日報違法和不良信息舉報電話:010-65363263 舉報郵箱:jubao@people.cn
人民網服務郵箱:kf@people.cn 違法和不良信息舉報電話:010-65363636 舉報郵箱:rmwjubao@people.cn
互聯網新聞信息服務許可証10120170001 | 增值電信業務經營許可証B1-20060139 | 廣播電視節目制作經營許可証(廣媒)字第172號
信息網絡傳播視聽節目許可証0104065 | 網絡文化經營許可証 京網文[2020]5494-1075號 | 網絡出版服務許可証(京)字121號 | 京ICP証000006號 | 京公網安備11000002000008號
人 民 網 股 份 有 限 公 司 版 權 所 有 ,未 經 書 面 授 權 禁 止 使 用
Copyright © 1997-2024 by www.people.com.cn. all rights reserved




-
評論

-
關注
微信微博快手
 第一時間為您推送權威資訊
第一時間為您推送權威資訊
 報道全球 傳播中國
報道全球 傳播中國
 關注人民網,傳播正能量
關注人民網,傳播正能量
